CAPITULO DIECIOCHO
Cinética de los cuerpos rígidos en tres dimensiones


Cantidad de movimiento angular de un cuerpo rígido en tres dimensiones

•donde r¡'y v¡‘ representan, respectivamente, el vector de posición y la velocidad de la partícula P, de masa m¡ relativa al sistema centroidal Gxyz. Pero v: = w x r: donde w es la velocidad angular del cuerpo en el instante considerado.


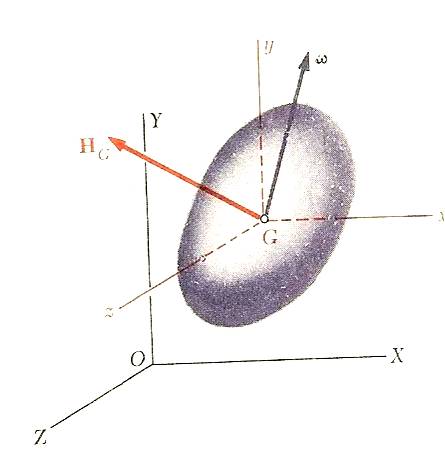
En la cinética de los cuerpos rígidos en tres dimensiones se conoce que su movimiento angular HG puede estar relacionada con la obtención de sus componentes que son los momentos de inercia con respecto a su centro de masa G

La figura muestran que la operación que transforma al vector W en el vector HG está caracterizada por arreglo de momentos y productos de inercia.

PROBLEMAS:
Una placa rectangular de masa m Suspendida con dos alambres A y B es golpeada en D en una dirección perpendicular a la de la placa. Representando por F t el impulso aplicado en D determínese, inmediatamente después del impacto a) la velocidad del centro de masa G, y b) la velocidad angular de la placa

La cantidad de movimiento de las partículas de un cuerpo rígido se reduce al vector de cantidad de movimiento lineal mv fijo en el centro de masa G y a un par de cantidad de movimiento angular HG
La cantidad de movimiento angular HG de un cuerpo con respecto a su centro de masa G puede determinarse de la velocidad angular W del cuerpo.
La cantidad de movimiento angular de un cuerpo respecto G puede expresarse como
En este capitulo retomamos las ecuaciones fundamentales de movimiento
Pero ahora para el estudio de un cuerpo en tres dimensiones